1. Introduction
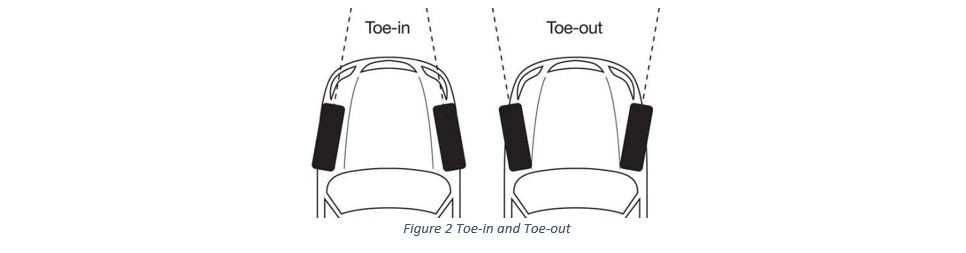
Recently, D.A.S. (Dual Axle Steering) system from Mercedes AMG Petronas Formula1 team (Figure 1) caught a lot of attention from automotive engineers all over the world. This special mechanical steering system allows managing the toe angle (Figure 2) when the driver pulls out the steering wheel, smartly acting in the “grey area” of the FIA regulations.
Media have stimulated several discussions aimed at assessing the real benefits of this device. A lot of analysis had been made on the effect brought by controlling the toe angle and guesses about its mechanical structure [1].
Regarding this topic, our technical teams developed a complete race simulation of Shanghai GP to understand and quantify the effects due to D.A.S. on vehicle performances with a focus on tires thermal behaviour.
In particular, a reference racing vehicle model of a Formula 1 race car under 2019 F1 regulations and specifications has been modelled in VI-grade VI-CarRealTime environment, working in co-simulation with a simple D.A.S. control developed via Simulink plugin and with MegaRide tire models.
The workflow can be summarized as follows:
- Model a generic Formula car vehicle model
- Model a multi-physical tire model
- D.A.S. modelling in Simulink environment
- Results Analysis.
2. The VI-grade vehicle model: VI-CarRealTime
2.1. VI-CarRealTime multibody modelling
VI-CarRealTime is a real-time vehicle simulation software for engineers who want to quickly evaluate the handling and ride performance of single or multiple vehicle configurations, develop and adjust vehicle controller and test a prototype or production ECU in virtual environment.
VI-CarRealTime is based on a Faster-than-Real-Time equation solver, which shares components with and has been validated against the industry standard Adams Car solution. VI-CarRealTime uses a conceptual 14 DoF (Degrees of freedom) vehicle model and multiple lookup tables to calculate the vehicle behaviors, which has rapidly increased the computational efficiency and promises very high accuracy. This ensures high quality and enables an easy exchange of data between engineering teams in all phases of the development process, from conceptual to detailed design, and across the different disciplines, supporting the communication within the organization and with suppliers. The open architecture enables the use of a proprietary definition of specific components when required.
VI-grade has also developed complete solutions in Adams environment, including VI-AutoMotive, VI-MxMount, VI-Damper and VI-MultiAxial Testrig. With VI-Automotive, engineers can start their simulation with well-defined vehicle templates, supporting third-spring, torsional springs, and quickly tune vehicle setup with friendly GUI. It is also possible to use VI-Driver and VI-Road in Adams environment, and, export vehicle model from Adams Car to VI-CarRealTime, making it real-time capable.
With VI-CarRealTime the development teams can even experience how a design change affects the vehicle more subjectively, by allowing test drivers to get a feeling for the car while driving the virtual vehicle on a motion base driving simulator. All this with one single model and one single set of data!
2.2. The Max-performance event
VI-CarRealTime takes advantage of the most advanced driver technology in the market. It is fast, robust, easy to tune and takes the vehicle to the limit without a cumbersome learning procedure, which other driver codes may require. With VI-Driver both open and closed-loop maneuvers are allowed.
VI-Driver MaxPerformance combines the VI-SpeedGen and VI-CarRealTime modules to automatically detect the maximum speed of a car on a given driverline. VI-SpeedGen will consider path curvature, longitudinal and lateral performance limits, road bank angle, suspension kinematics and tire limits, then creates a target speed profile for dynamic simulation. During dynamic simulations, an online check of the speed profile feasibility is performed and local recursive corrections of the speed profile on individual track segments are determined.
Vl-Driver Max Performance pushes the vehicle dynamically to the limit while considering the:
- Path distance
- Yaw rate limits
- Longitudinal speed threshold
- Wheel Locking
With VI-MaxPerformance, you can also quickly define the DRS effect and KERS boost function with a parameter table, which makes it easier to simulate a flying lap of a modern race car. Multiple laps simulation is also possible if you want to investigate the performance of race car during a race session.
2.3. Investigation mode
Finding the optimum setup for a race car is of vital importance in a race weekend. VI-CarRealTime supports not only commercial multiple-objects optimization tools, but also integrated DoE interface. Now, with investigation mode, users can carry out these researches more quickly.
VI-CarRealTime allows to automatically investigate the responses of several variants of a model through a dedicated section of the user interface. Users can easily select the model parameters to be included in the investigation, specify the events to be used for exercising the vehicle and define factors and metrics to be monitored for each run. Once the investigation is completed, all results are collected in an interactive HTML report.
The investigation mode can be applied to any combination of VI-CarRealTime models and test events.
As an example, the tunable model parameters include:
- Scaling factors for suspension curves kinematic and compliance
- Scaling factors for suspension elements, such as springs, dampers, bumpstops, and anti-roll-bar
- Suspension setup, such as ride height, wheel alignment
- Mass / inertia properties
- Driveline parameters, such as transmission gear ratios, LSD preload and locking coefficient
- Brake parameters, such as piston areas, brake bias and effective radius
- Aeroforce modifiers
- Rack and pinion steering parameters including EPS
- Tire property files
In dedicate GUI, users can define the makeup of the workspace, selecting 2-level or full-factorial workspace, or customize the workspace as required. To view the response as users like, customized response functions can also be defined, when predefined functions do not meet user requirements.
3. Model a generic F1-style vehicle model and calibrate it to validate the performance:
3.1. Longitudinal performance validation
In order to discover the influence of D.A.S. system on the performance of the race car, a reliable vehicle model is needed.
From public resources it is possible to set the overall performance target of a generic F1-style race car [2][3], in terms of acceleration/deceleration/cornering limit, top speed, as well as of aerodynamics drag force influence on acceleration and of downforce influence on braking (Figure 3) and cornering at different speeds, also including the DRS influence.
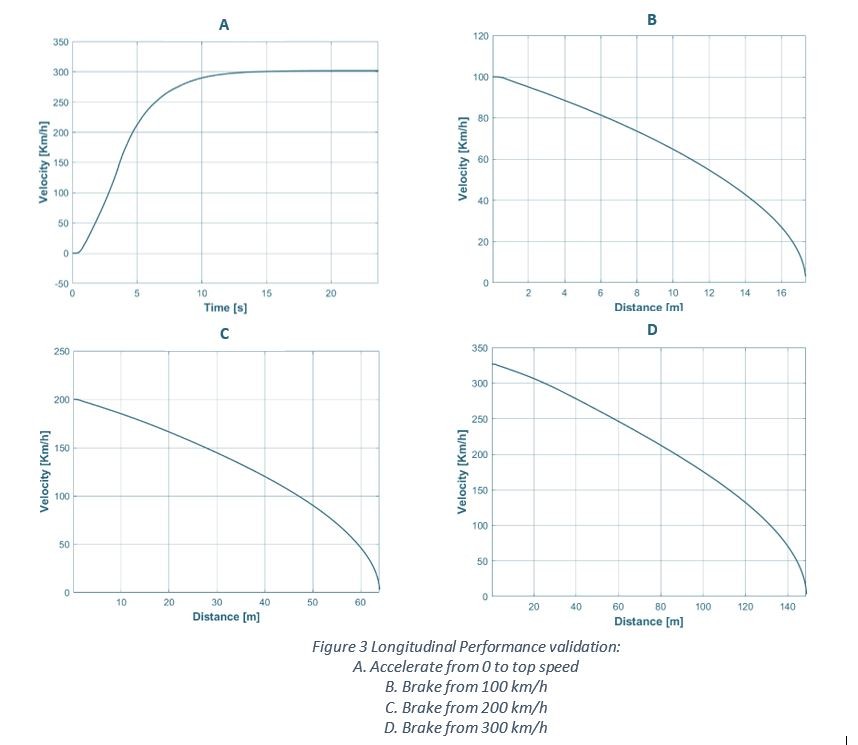
Some of the key performance are listed in the following (launch times and braking spaces):
- 0-100 km/h: 2.83 s
- 100-0 km/h: 17m
- 0-200 km/h: 4.66 s
- 200-0 km/h: 64m
Then, using the typical RaceCar and Formula car demo models from VI-CarRealTime, and the easy-to-use tool Vehicle Wizard, it is possible to model a reliable simple model from scratch. Using VI-SuspensionGen, it has been possible also to add third elements in the suspension design to easily control the pitch/heave, as well as getting typical kinematic curves.
Using VI-Driver algorithm, some basic test fingerprint has been created to validate its longitudinal and lateral performance. After tuning the aero maps and tire model, such targets matched as showed in Figure 3 allowing to proceed to lap time simulations.
3.2. Defining the trajectory and setting the DRS system
As a turn-key solution supplier for driving simulator technology, VI-grade provides most of the world-famous tracks in a virtual environment.
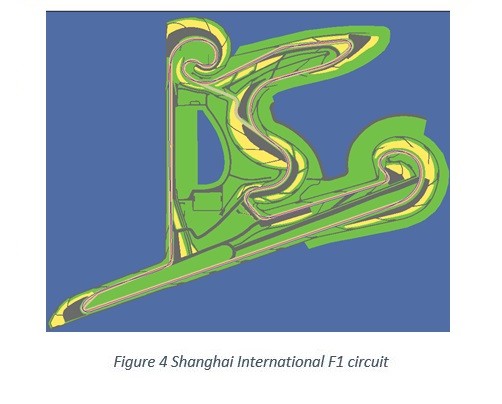
In this case-study, Shanghai International F1 Circuit (Figure 4), derived from CAD data, has been chosen to perform the lap time simulation and D.A.S. demonstration for its being a high-speed circuit, interesting to highlight drag and thermal phenomena involving D.A.S. system.
Using VI-Road it is possible, starting from the centerline of the road file and setting the track width, to model a race line similar to the real one and to analyze the speed profile of different race lines using VI-SpeedGen.
With the VI-MaxPerformance driver model, it is possible to test the race car’s dynamic performance limits in a virtual environment, with its closed-loop algorithm.
To avoid introducing too many variables, the effects of KERS and ERS system have been neglected.
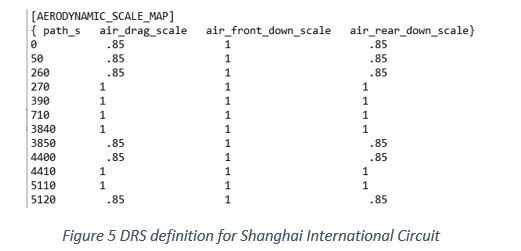
DRS activity zones are added directly into the VI-CarRealTime GUI according to FIA regulations effect with “performance modifiers” (Figure 5), which is an option in MaxPerformance simulation.
3.3. Toe angle DOE and MaxPerformance event for lap time simulations
Using the VI-MaxPerformance virtual driver model, after some iterations, the final lap time and speed profiles are obtained, resulting satisfyingly close to the pole lap record in real life in 2019 Chinese GP [4].
To let the system, behave closer to reality, the best initial toe setup has to be found, and then the D.A.S. will be added.
To find the best setup with tens of variants optimization is commonly used, but for this simple demonstration, a DoE simulation has been developed to make an investigation just regarding the front toe angle, which is the parameter of interest in this study.
Having already defined the typical values for camber angle and ride height, the ‘Investigation Mode’ allows identifying the best front toe setup: using the DoE analysis tool, several toe setups have been tested on R100m high-speed chicane (Figure 6) and R20m low-speed chicane, which are very often seen on different circuits, in order to cover the performance during the brake-entry-apex-exiting phase, and then get the responses of passing time, maximum lateral acceleration and understeer gradient.
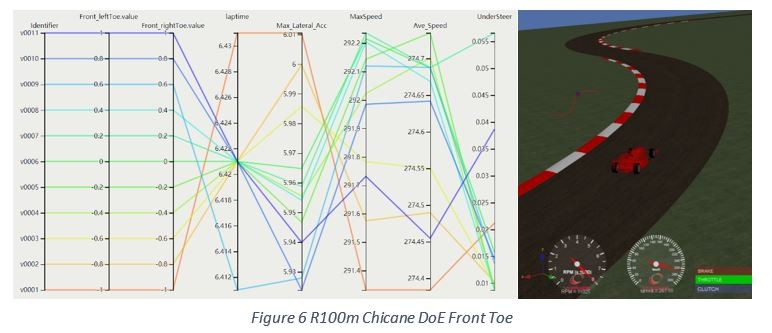
Thanks to the DoE, a -0.8 deg static front toe angle has been chosen, which will produce higher lateral limit and better response for entry of cornering, especially in a low-speed corner. This value was chosen, even if higher than one in a real condition since it allows to highlight the DAS effect too.
Using this toe setup to run MaxPerformance event, a lap time of 1:31.05 sec in Shanghai International Circuit has been obtained, with 20kg fuel load, maximum powertrain output and activated DRS to simulate the flying lap of a qualifying session, while the pole lap record in real life is 1:31.547sec in 2019 Chinese GP.
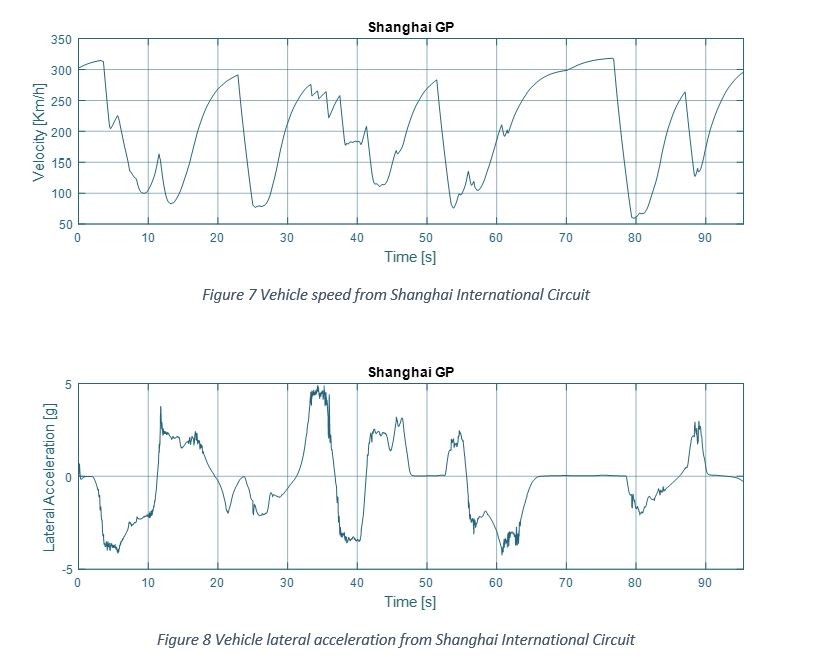
Then, to highlight the D.A.S. effect on a race stint, the virtual driver behaviour has been tuned to match the typical pace of a race stint. It has been possible to get 1:35.39 s laptime in Shanghai International Circuit with 20kg fuel load (Figure 7, Figure 8), while the fastest lap in 20019 Chinese GP is 1:34.74 s.
After checking the speed profiles and lateral/longitudinal acceleration range, these two nice and smooth laps have been selected to be good baselines for D.A.S. comparison.
4. RIDEsuite: Multiphysical Tire Model
4.1. RIDEsuite: Introduction
Due to the intrinsic dependences of the tire structural characteristics, of the compound viscoelastic behaviour and a multitude of further physical interconnected phenomena (e.g. the tire inner layers’ temperature, the internal pressure, the road roughness or the tire working conditions) the only possible approach to fully understand the tire dynamics and its modelling is multiphysical [5].
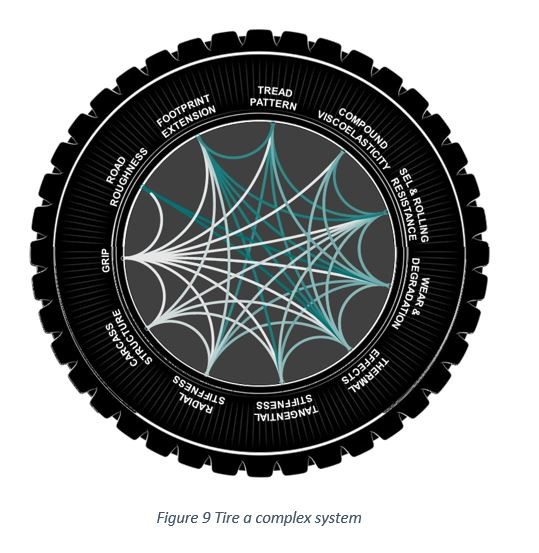
The experience gained through the development of physical models concerning tire and vehicle systems and the activities recently carried out by the Vehicle Dynamics UniNa research group and its academic spin-off company MegaRide in the field of real-time simulations led to developing an innovative multiphysical tire model based on Pacejka’s Magic Formula interaction model [6], ready to be integrated within a complete vehicle real-time simulation environment. The employment of a suitable set of tools and models is necessary to completely understand and characterize all the physical phenomena linked to the complex dynamics of the tires. It is well known that the characterization of this vehicle subsystem is quite difficult and delicate because the tire forces demonstrate a complex and highly nonlinear dependence with slip ratio, slip angle, camber angle, vertical load, inflation pressure, wear level, internal and external temperature distributions Figure 9.
The RIDEsuite, with a modular structure (Figure 10), allows to consider the wear/temperature/friction phenomena within the tire dynamics in different working conditions and to be simulated in real-time since the tire dynamic model is based on the analytic MF formulation, representing a remarkable compromise between accuracy in depicting the physical phenomena and extremely low computational burden.
To develop this case study RIDEsuite has been used in the following configuration:
- thermoRIDE (tire thermal model)
- weaRIDE (tire wear model)
- 3D-Ride (tire multi-contact ride model)
- adheRIDE (advanced MF infrastructure)
4.2. RIDEsuite: thermoRIDE
thermoRIDE [7] is a physical-analytical tire model, employable to take into account all the phenomena concerning the tire thermal behaviour during its interaction with both the external environment and the inner wheel chamber (inner air, rim, brakes, vehicle geometry, etc.,), as illustrated in Figure 11.
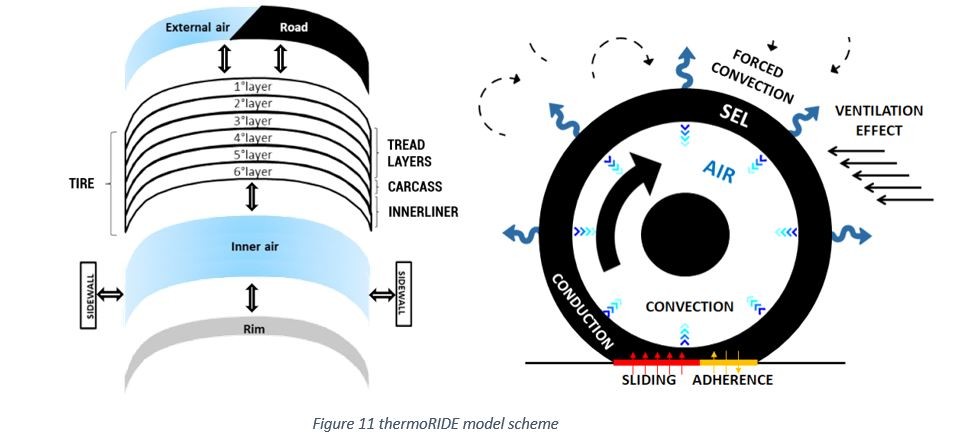
thermoRIDE model takes into account the following physical phenomena:
• Heat generation within the tire structure due to:
- Tire/road tangential interaction, known as FP (friction power);
- Effect of tire cyclic deformation during the tire rolling, known as SEL (strain energy loss).
• Heat exchange with the external environment due to:
- Thermal conduction between the tire tread and the road pavement;
- Thermal convection of the tread surface with the external air;
- Thermal convection of the inner liner surface with the inner air.
• Heat conduction between the tire nodes due to the temperature gradient.
• Heat conduction between the tire and brake disk.
To parametrize thermoRIDE model, two steps are needed:
• Physical Parameterization
- Footprints Data;
- Thermodynamic Coefficients;
- Tread Viscoelasticity and Carcass Structure;
• Model Calibration and Validation
- Specific Outdoor Routines for the Scan of the various Physical Phenomena.
thermoRIDE advanced structure enables to include particular aero-design solutions and specific cooling/heating configurations within its interaction with both the external environment and the internal air, accounting for tread wear and degradation phenomena. The thermodynamic tests have been carried out at the UniNa tire lab using proprietary nondestructive methodologies.
4.3. RIDEsuite: adheRIDE
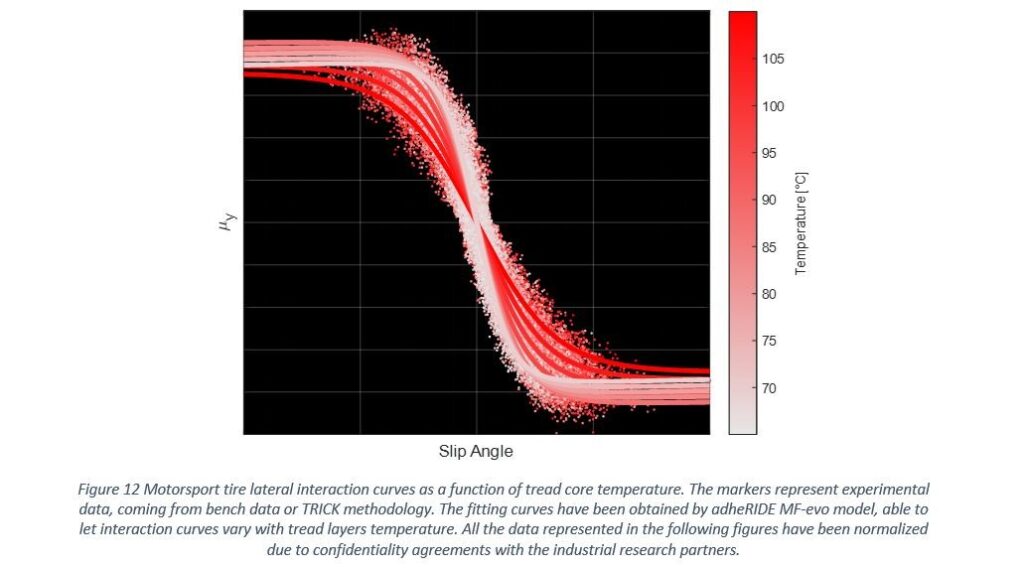
After the standard MF parameters’ identification, in order to make the MF model sensitive to thermal effects, it has been enriched with the MF coefficients variation using pre-identified analytic functions (using experimental data acquired for a formula-like tire) [8].
The latter have been identified always on experimental data (using data acquired for a formula-like tire) and reproduce the effects of temperature and pressure on tire performance, both regarding the maximum exploited grip and stiffness. The procedure has further been implemented within a smart tool in MATLAB environment, which guides the user through the steps necessary for correct identification of the Pacejka’s coefficients and of the embedded functions that link the dynamic parameters of the model to the thermal effects.
The importance of the tire thermal model additional outputs, related to the inner layers temperature and heat fluxes, can be easily deduced from the Figure 12 in which the tire tread core temperature, not available from usual sensor data (but provided by the thermal model) deeply modifies the tire dynamic behaviour. The differences in terms of interaction curves can be easily appreciated, highlighting stiffness decrease due to a higher tire temperature.
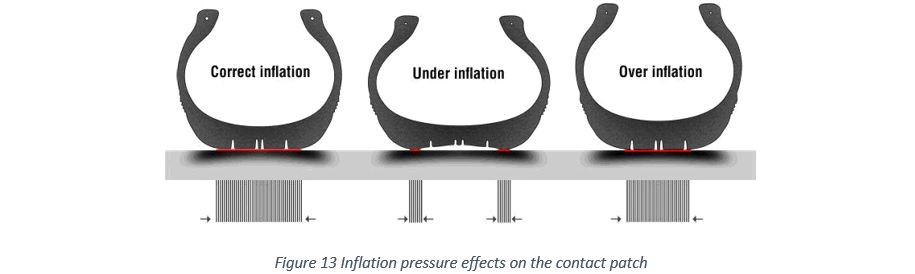
Changing inflation pressure even affects tire force and moment characteristics. This happens because changes in inflation pressure alter the size, shape and contact pressure distribution (Figure 13) in the footprint of the tire. In general, increasing inflation pressure will cause the size of the footprint to shrink, raise the contact pressure near the centre of the footprint and allow less tire distortion (less footprint shape change).
Developing a multi-physics tire model, that takes into account how its dynamics is influenced not only by dynamic and kinematic parameters but also by thermodynamic ones, is strongly necessary to have realistic race simulations.
4.4. RIDEsuite & VI-grade VI-MaxPerformance interaction
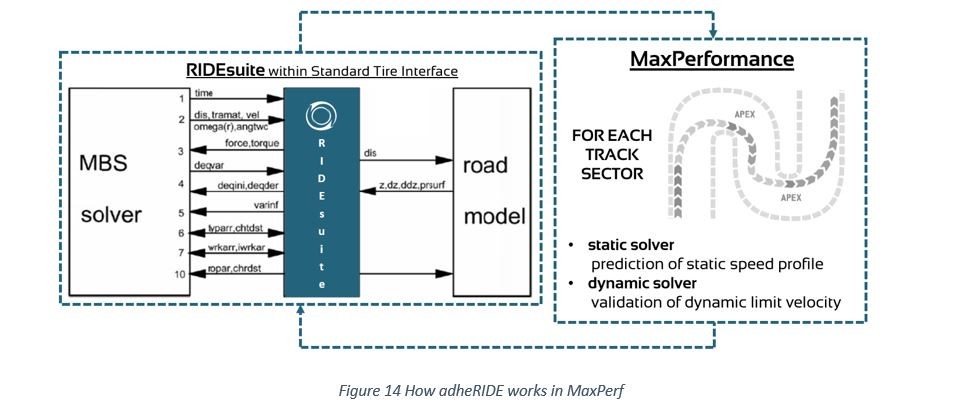
RIDEsuite has been developed both in C and MATLAB/Simulink languages, to be fully compatible with any simulation platforms and of course with VI-grade VI-CarRealTime virtual environment through a standard API communication protocol (Figure 14).
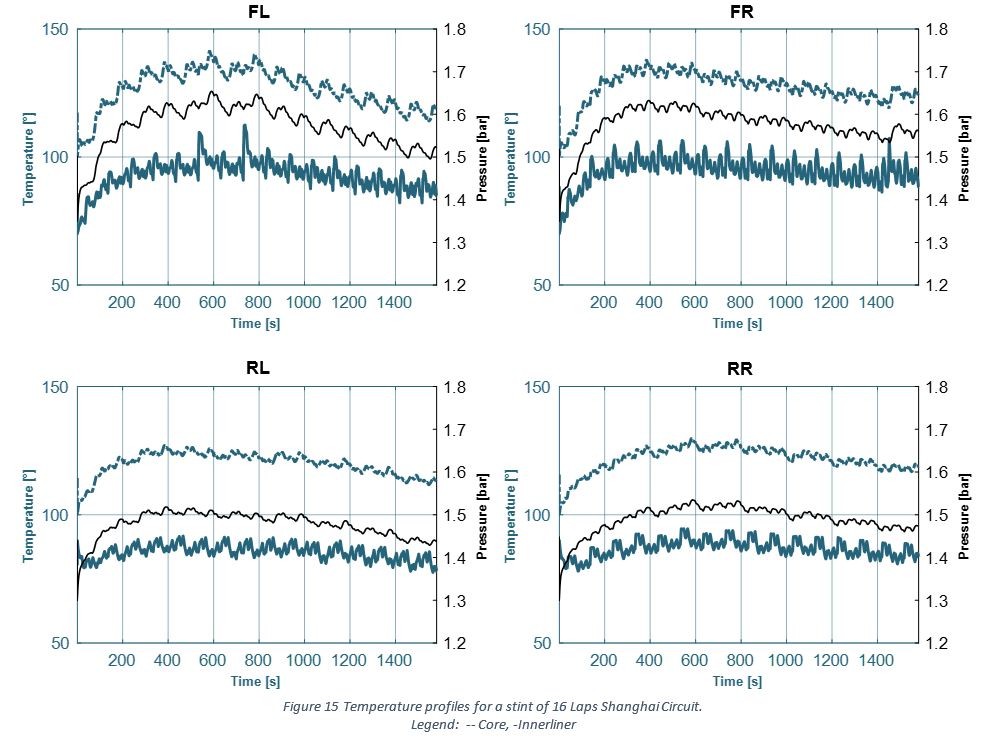
To evaluate the reliability of the used tire model, a stint of 16 laps for Shanghai GP, have been simulated.
In Figure 15 the evolution of tire tread core and inner layer temperature is shown. This plot highlights a fundamental aspect of tire dynamics during a long stint of laps. Tire average temperature tends to decrease (after a first warm-up and subsequent steady phases) due to the wear effect which causes a tread thickness reduction and a lower volume for the generation of heat for strain energy loss.
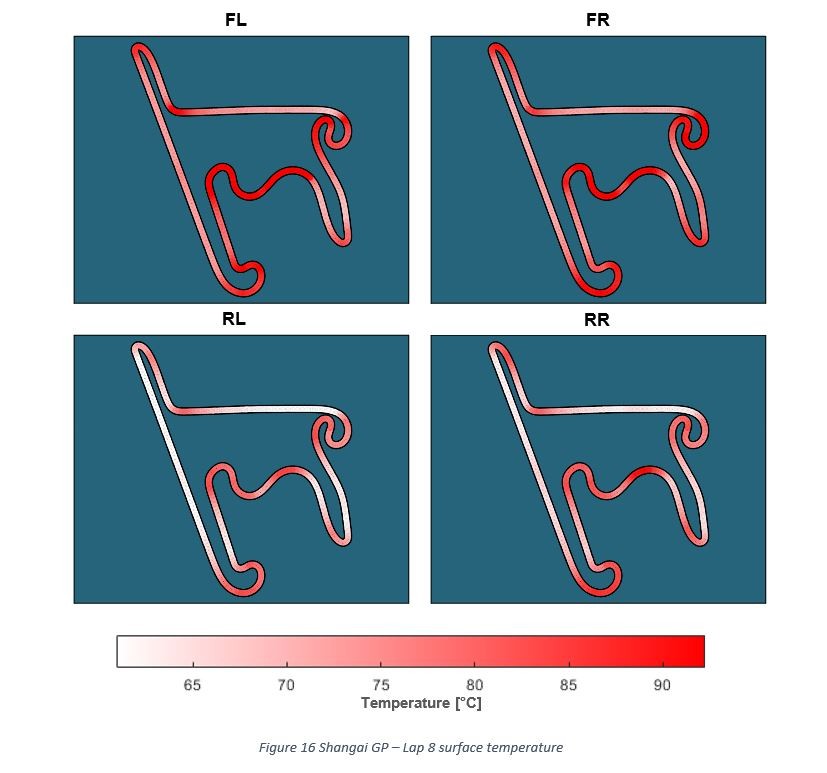
In the following figure (Figure 16) the tires surface temperature along the track (Lap 8) has been shown. Due to the relationship between the friction power and surface temperature, the “critical curves” in terms of max tire surface temperature have been shown.
5. Model the D.A.S. control system in Simulink
There is a lot of uncertainty regarding the actual D.A.S. system [1], but for lap time simulation the detailed modelling of the mechanism is not necessary, needing only to reproduce the function of changing the toe angle of front wheels (it has been supposed that the D.A.S. system does not influence the wheel camber angle)[9].
Assuming that decreasing the absolute toe value can minimize the tire drag force and control the tire temperature (because of less slip angle) in long straights, a toe offset was added to make the toe value as close as possible to 0 deg while activating in long straights (similar to DRS system).
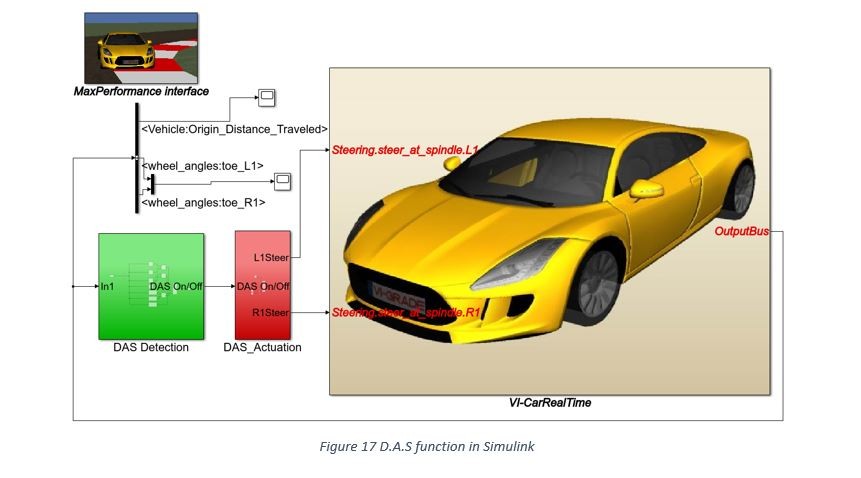
Then D.A.S. control function is implemented in Simulink environment (Figure 17): the D.A.S. control system detects the location of the car, adding a toe offset to wheel steer angle when the vehicle is in specific points of the straight.
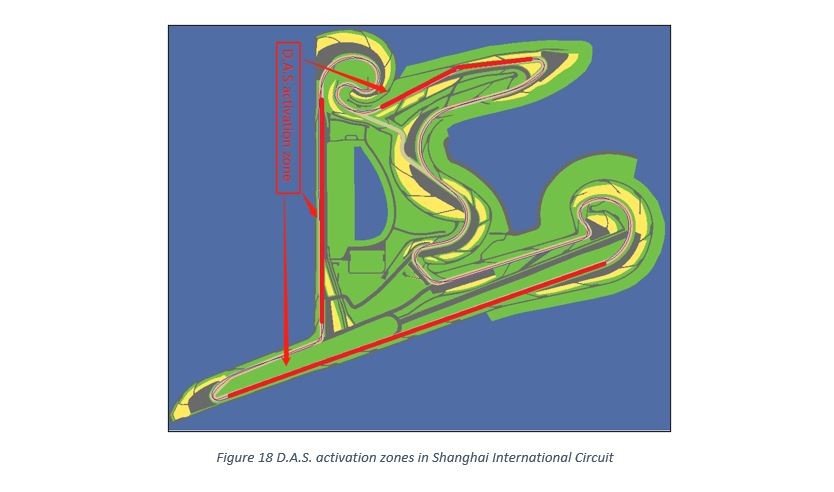
In the Shanghai International Circuit, three D.A.S. activation zones have been chosen and are represented in Figure 18.
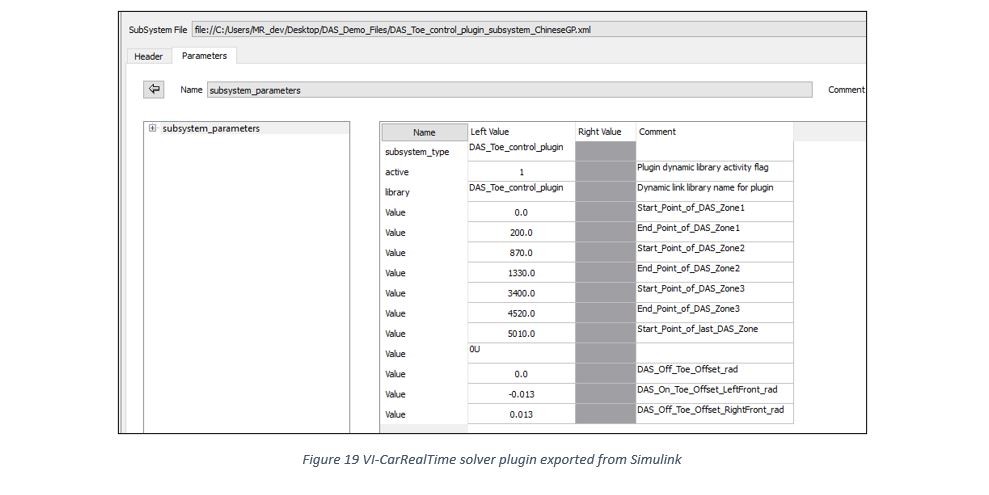
To achieve a lower computation time and allow future DOE analysis, the D.A.S. Simulink model has been exported into dynamic load library (Figure 19) which allows simulating without using the Simulink environment (using: VI-CarRealTime Solver Plugin Export from Simulink).
6. Final results analysis
In this section, the results obtained have been analyzed.
In paragraph 6.1 D.A.S. system effect on the vehicle dynamic behavior without taking into account tire thermal effects has been analyzed using a single lap comparison with and without D.A.S. activations.
Furthermore, in paragraph 6.2 the effects in terms of tire thermal behavior have been analyzed using a six laps comparison in which the last two laps have been executed with and without D.A.S. activations.
6.1. Vehicle dynamics analysis
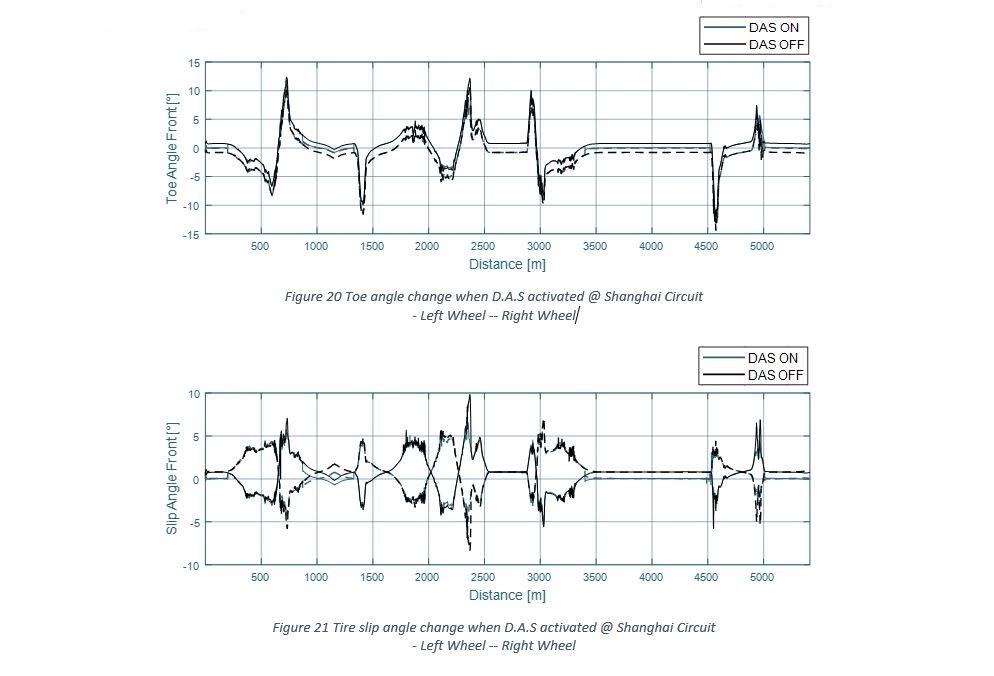
To highlight the effects of D.A.S. system on the vehicle dynamics behavior in this section one lap with D.A.S. ON and D.A.S. OFF has been analyzed without taking into account thermal effects.
As Figure 20 and Figure 21 show, D.A.S. activation allow to reduce the front slip angle by acting on the front wheel static toe.
Although to calculate the tire drag [10] reduction an additional mathematical channel has been added to result using the following equation:
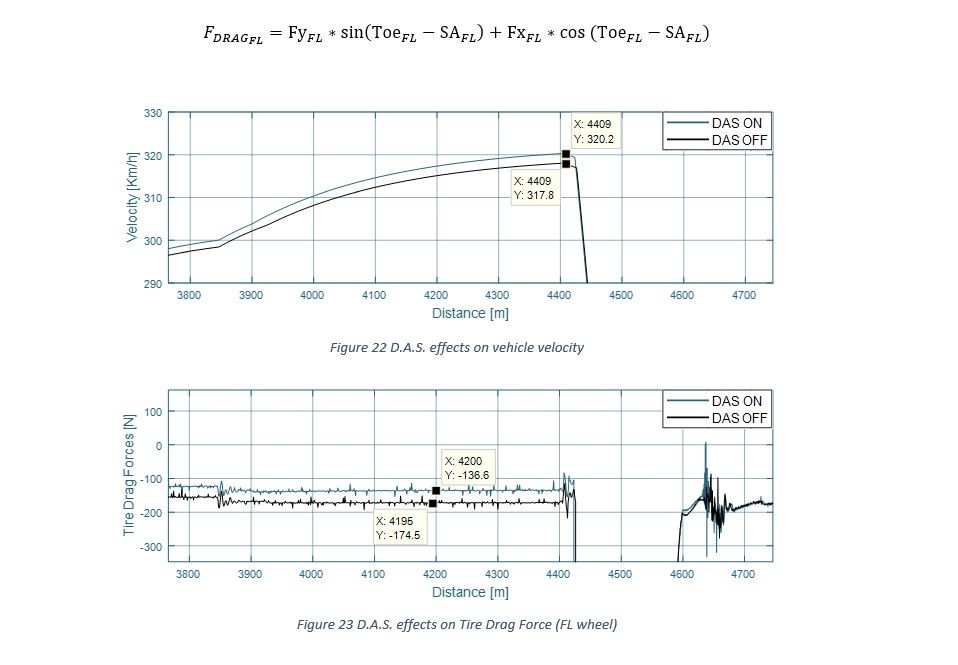
As Figure 23 shows, when D.A.S. is activated, the tires front slip angle decreases significantly, then the front left tire drag force also goes down by 20 % in long straights. Therefore, the top speed benefit (Figure 22) is not improved significantly (around 2 km/h).
To make a comparison, a flying lap without DRS it has been simulated (not shown in this article), which shows that DRS can bring 10-20 km/h higher top speed and up to 800N aero drag force reduction, while D.A.S. only brings about 50N tire drag force reduction. But D.A.S. activation is not strictly controlled by FIA regulations, so D.A.S. can be activated as driver requests, with more available sectors to accumulate this little advantage.
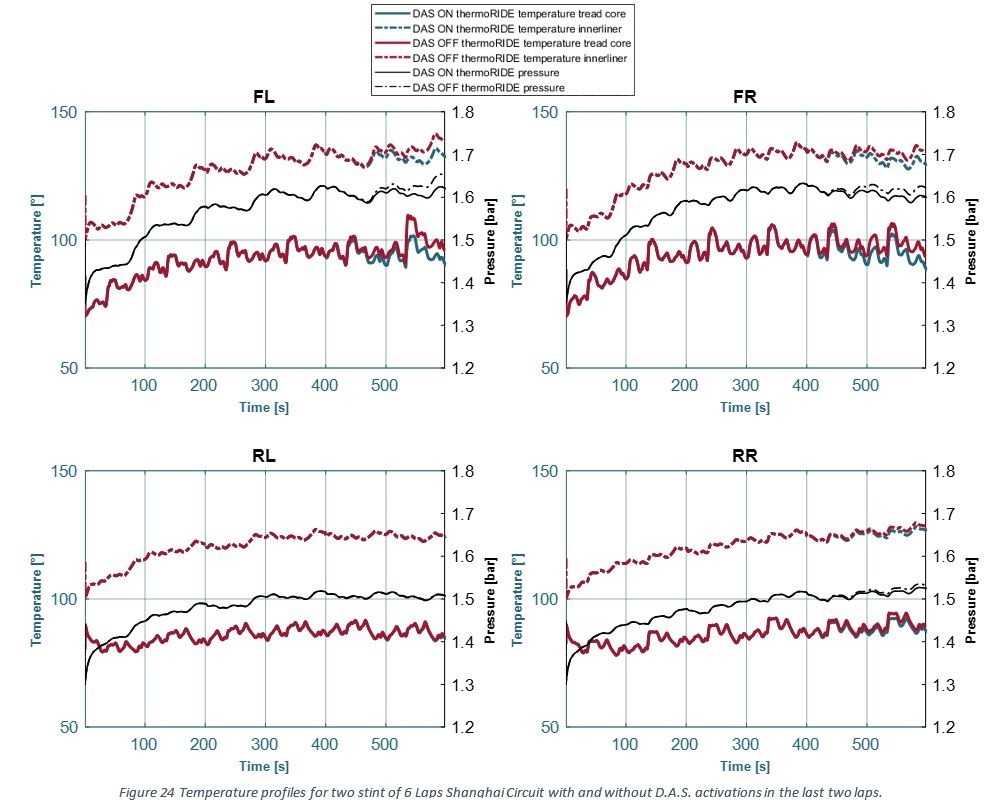
6.2. Thermal Analysis
To evaluate the D.A.S. system effect on tire thermal behavior six laps run in Shanghai GP has been simulated. Two working conditions have been investigated:
- 6 Laps D.A.S. OFF;
- 4 Laps D.A.S. OFF plus 2 Laps D.A.S. ON;
In Figure 24 can be observed the underheating effect due to D.A.S. activations, linked to the friction power reduction.
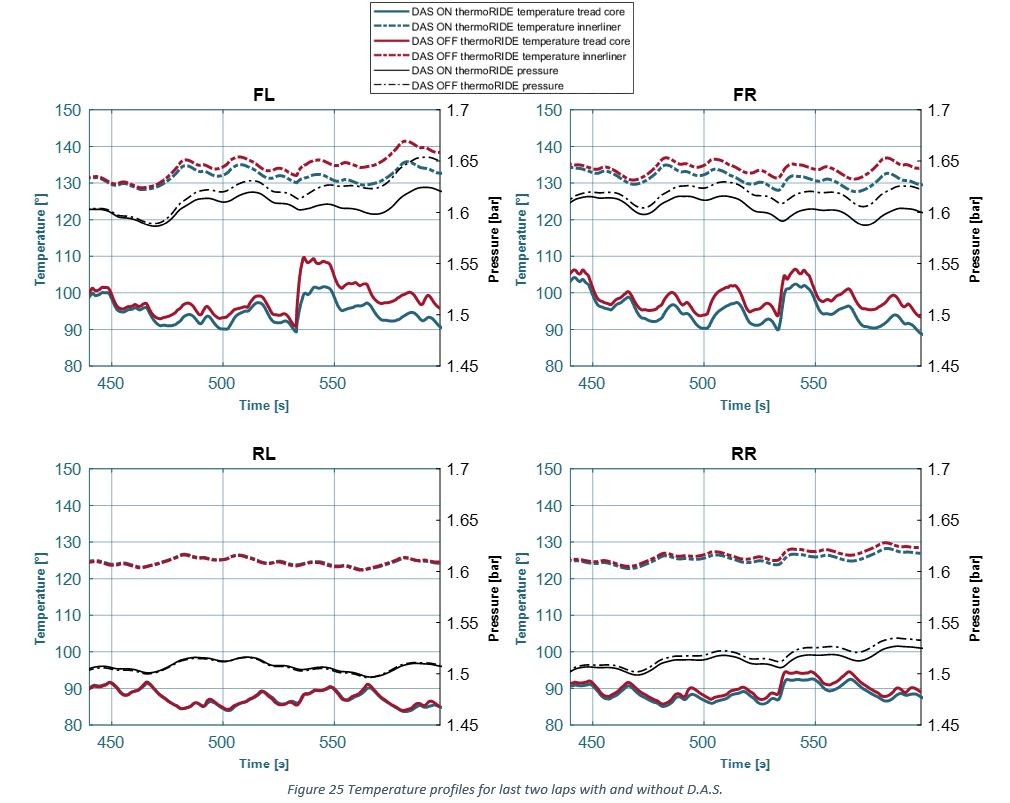
It is necessary to clarify that these differences in terms of thermal behavior (Figure 25) are the results of a vehicle setup which has been specifically developed to highlight the D.A.S. effects. Also, the D.A.S. activation logic works in open loop, so that the virtual driver activates the D.A.S. system for each straight without taking into account the tire temperature.
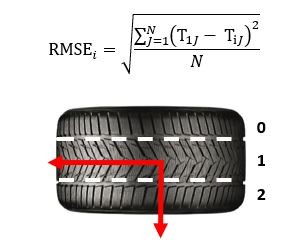
To well-understand the phenomena in the detail, for the lap 4 the root-mean-square error (RMSE) between the surface temperature of the “central rib” with respect to the “lateral ribs”, whose local temperature are provided by thermoRIDE thermal model, has been evaluated.
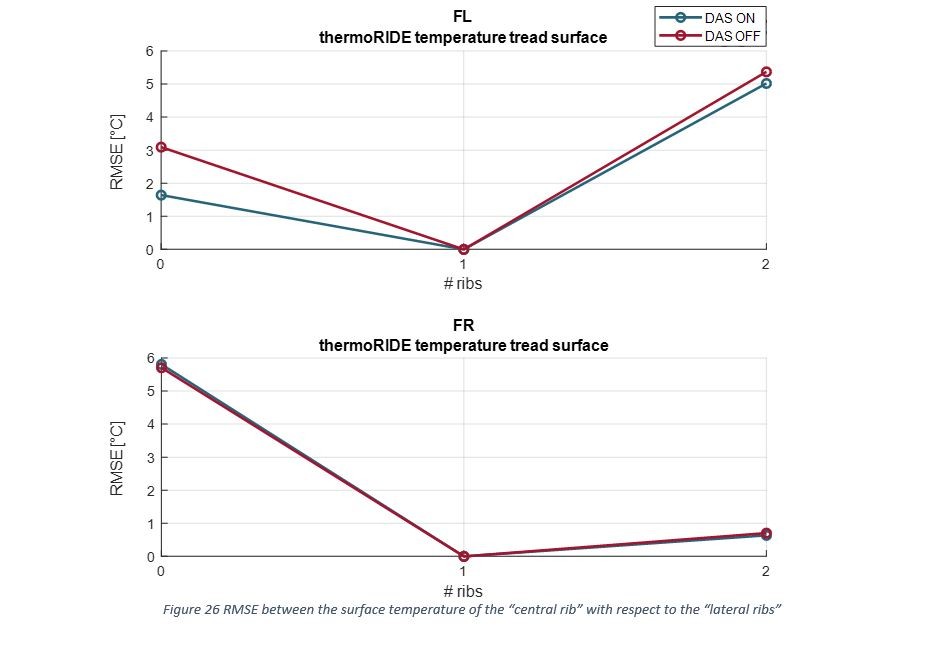
The RMSE of the external temperature of the two lateral tread surface ribs, with respect to central rib, is plotted for the D.A.S. ON and D.A.S. OFF scenarios in Figure 26.
D.A.S. ON simulations show lower levels of RMSE. It means that tires have a more homogeneous temperature distribution and that thanks to a proper adoption of the device, tire management can be improved
High differences among ribs energies (and consequently temperatures) affect the undesired phenomena linked to irregular wear (local graining, mechanical degradation, …). A device able to let the whole tread work reducing the “thermal shocks” could become a real advantage in the optimal management of a long race event, guaranteeing good handling and durability.
7. Conclusions
The illustrated case-study has been carried out in the domain offered by the collaboration activities between MegaRide (a start-up and a spin-off of University Federico II) and VI-grade (leader company in the vehicle dynamics simulations).
A realistic virtual environment has been developed which can be summarized as follow:
- GP track model;
- Formula car vehicle model;
- Multiphysical Racing Tire model;
- D.A.S. system model.
The results showed that the D.A.S. system slightly influences the maximum vehicle speed due to an aero drag and tire friction reduction in straight conditions. Significant results have been obtained analyzing the tire thermal behaviour in a stint of six laps where the last two laps have been simulated with and without D.A.S. system active.
Specifically, due to lower friction power, linked to the decrease of slip angle in the D.A.S. activation phases, the simulation with the device leads to a lower thermal level. Such results can be interpreted as an advantage in case the tire dynamic evolution leads to an overheating condition, typical of highly stressing tracks.
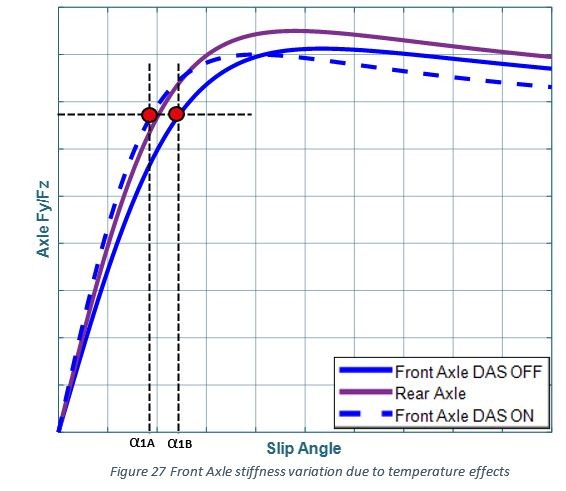
In Figure 27 the temperature effects on the vehicle front axle stiffness have been highlighted. Being, generally speaking, lower stiffness for higher temperature. The vehicle over/understeer behaviour can be managed, thanks to the availability of D.A.S., by a further “tuning element” that can give the driver the possibility to act on the energetic flux from the contact patch to the whole tire, optimizing the grip balance.
Of course, the presented case study has to be intended as a preliminary overview of the D.A.S. system effects on the vehicle and tire dynamics. Further developments will concern the deeper analysis of the tread wear predictions with/without the device active, and a more detailed activation logic, able to define the necessity and the entity of the activation in relationship with the real-time requirements of the driver.
Activity carried out in cooperation with VI-grade by Giuseppe Tranquillo – Vehicle Dynamics Engineer